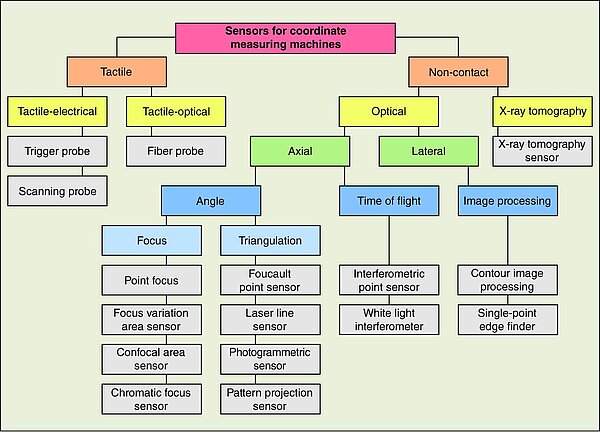
Only measurements of two-dimensional (2D) or stepped (2½D) objects can be carried out with lateral measuring sensors. In order to carry out three-dimensional (3D) measurements of workpieces with optical sensors, additional methods are required to measure along the third coordinate axis. As the sensors used for this purpose determine the distance between the sensor and the workpiece surface, they are also referred to as distance sensors or axial measuring sensors. These distance sensors work according to different physical principles, which can be roughly categorised into time-of-flight and angle-based methods (see Fig. 6). The time of flight of a light beam from the sensor to the object and back can currently not be determined directly for short distances, but only using interferometers. The angular relationships between the measurement beam and the sensor or between the aperture of the optics and the working distance are used in triangulation and focussing methods to determine the distance (Fig. 8).
The benefits of optical sensors for this application lie in the non-contact measurement. This means that both sensitive workpieces and those with small features can be measured. Plastic parts, optical functional surfaces, flexible sheet metal parts and components for micromechanics (implants, watches) are typical measuring objects. Non-contact measurement eliminates the need for difficult set-ups for small or elastic parts. With optical sensors, many measurement points can be captured very quickly or even simultaneously. Compared to other sensors, their use therefore usually leads to significantly shorter measuring times. For this reason, they are used for a wide variety of workpieces in production monitoring.